13.1. Sistemi di coordinate per lo spazio euclideo \(E^3\)#
13.1.1. Coordinate cartesiane#
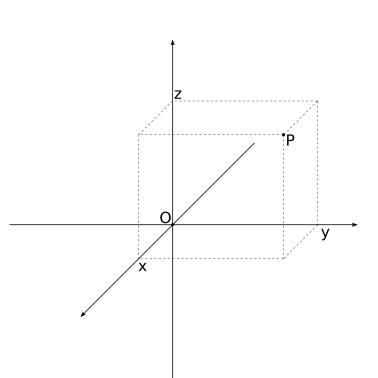
Le coordinate cartesiane \((x,y,z)\) di un punto \(P\) dello spazio euclideo \(E^3\) permettono di definire il vettore euclideo tra l’origine \(O \equiv (0,0,0)\) e il punto \(P\)
usando i vettori della base cartesiana \(\{ \hat{x}, \hat{y}, \hat{z} \}\)
13.1.1.1. Distanza punto-punto#
Usando le coordinate cartesiane, la distanza tra due punti \(P \equiv(x_P, y_P, z_P)\), \(Q \equiv (x_Q, y_Q, z_Q)\) si può calcolare usando il teorema di Pitagora come
13.1.2. Coordinate cilindriche#
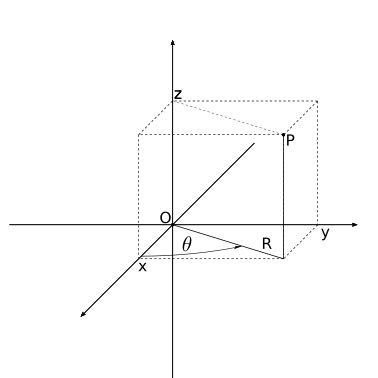
Dato un sistema di coordinate cartesiane, si può definire un sistema di coordinate cilindriche \((R, \theta, z)\) con la stessa origine, asse \(z\) coincidente e usando il piano \(x\)-\(y\) come origine per misurare l’angolo \(\theta\) attorno all’asse \(z\), tramite la legge di trasformazione delle coordinate
13.1.3. Coordinate sferiche#
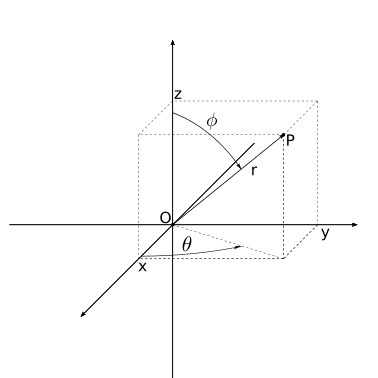
Dato un sistema cartesiano e scelto un sistema di coordinate cilindriche come appena descritto, si può definire un sistema di coordinate sferiche \((r, \theta, \phi)\) tramite le leggi di trasformazione di coordinate
|
|
|