48.3. Inverted pendulum#
48.3.1. Equations of motion with Lagrangian mechanics#
48.3.1.1. Non-linear equations#
Second-order dynamical equation of the mechanical system reads
Equilibrium conditions of unforced system (\(C = 0\)) are found for \(\overline{\theta}_1 = 0\), \(\overline{\theta}_2 = \pi\). The first equilibrium is unstable, the second equilibrium is stable. Around the second equilibrium, the linearized equation becomes
so that, for under-damped systems, it’s possible to define the natural frequency of the undamped system \(\omega_n^2 = \frac{g}{\ell}\), and the damping coefficient \(\xi\)
as, by definition
48.3.1.2. Equilibria#
48.3.1.3. Linearized equations around equilibria#
Linearized equation around the stable equilibrium. First-order system equation around the stable equilibium becomes
Linearized equation around the unstable equilibrium. First-order system equation around the unstable equilibium becomes
This the equation we’re interested in, when studying the inverted pendulum system.
48.3.1.4. Augmented sytem for tracking reference signal#
Let \(\mathbf{y}_{\text{ref}}\) a reference signal. An augmented system can be defined in order to used optimal control. Let
the state-space representation of the plant. Let \(\mathbf{y}_{\text{ref}}\) a desired output and the integral error
as a new state with dynamical equation
The optimal control is applied to the augmented system
Optimal control framework provides the opitmal gain matrix \(\hat{\mathbf{K}}\), so that \(\mathbf{u} = - \hat{\mathbf{K}} \mathbf{z}\) and the closed loop system becomes
If the output of the system is the angle \(\theta(t)\), with reference signal \(\mathbf{y}_{\text{ref}} = \theta_{\text{ref}}\), the dynamical system is a SISO system, whose state-space representation is
…
48.3.2. Libraries#
Show code cell source
# Install the control library if running in Colab
try:
import control as ct
except ImportError:
!python3.11 -m pip install control
import numpy as np
import scipy as sp
import control as ct
import matplotlib.pyplot as plt
Show code cell source
print(ct.__version__)
0.10.2
48.3.3. Plant dynamical equations#
Show code cell source
#> Inverted pendulum plant (linearized) equations
#> Parameters
"""
omega_n = 1.0
xi = .1
g = 9.81
m = 1.
l = g / omega_n**2
c = 2 * xi * omega_n * m * l**2
"""
g = 9.81
m = .1
l = .2
omega_n = np.sqrt(g/l)
xi = .02
c = 2 * xi * omega_n * m * l**2
#> Matrices of the state-space representation
A = np.array([[0., 1.], [omega_n**2, -xi*omega_n]])
B = np.array([[0.], [1./(m*l**2)]])
C = np.array([[1., 0.]])
D = np.array([[0]])
sys = ct.ss(A, B, C, D)
Show code cell source
#> Augmented system for reference input
# dx = A x + B u
# dz = e = y[0] - yref = C[0,:] x + D[0,:] u - yref
# y = x
# d [ x ] = [ A . ][ x ] + [ B ] u + [ . ] yref
# [ z ] [ C[0:] . ][ z ] [ D[0:] ] [-I ]
Aa = np.block([
[ A, np.zeros((2, 1))],
[C[0,:], np.zeros((1, 1))]
])
Ba = np.block([
[B],
[D[0,:]]
])
Ca = np.block([
[C, np.zeros((1,1))]
])
Da = np.array([[0]])
sys_aug = ct.ss(Aa, Ba, Ca, Da)
evals = ct.poles(sys_aug)
print(evals)
[ 0. +0.j -7.07395639+0.j 6.93388498+0.j]
48.3.4. Control#
48.3.4.1. Optimal control for full-state feedback#
State-space representation of the open-loop system from the tracking error \(\mathbf{e}\) to the output \(\mathbf{y}\) reads
or
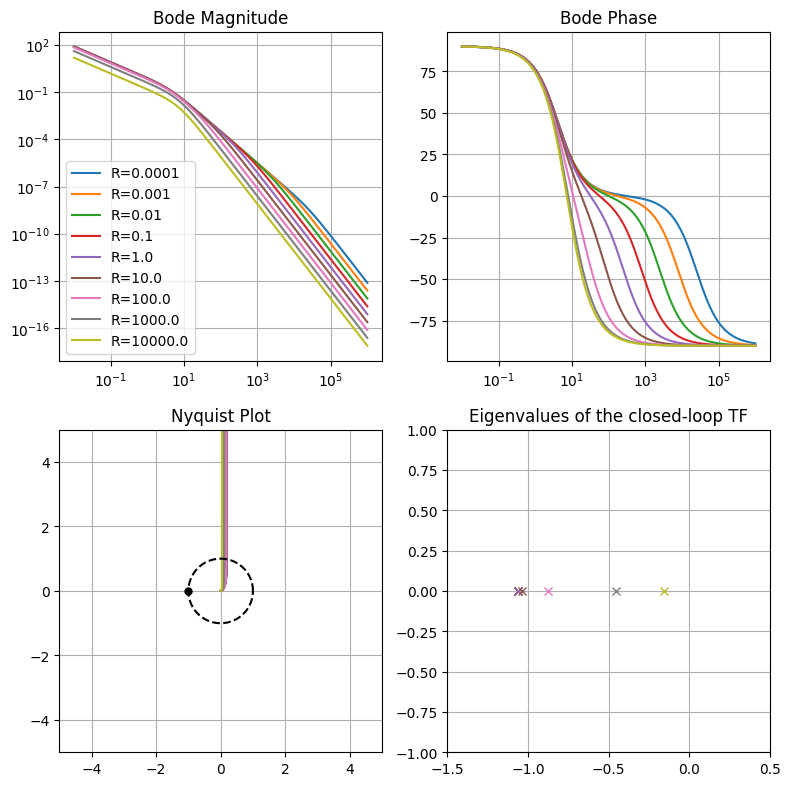
48.3.4.1.1. Sensitivity to control weight#
For a given weight matrix on the augmented state \(\mathbf{Q}\), here the sensitivity to the value of the control weight \(\mathbf{R} = [ \ r \ ]\) is investigated. Here, the output is the angle \(\theta\) of the inverted pendulum w.r.t. the unstable equilibrium.
Bode and Nyquist diagram of the stabilized1 open-loop TF are shown, along with the eigenvalues of the closed loop system, with the reference signal as input.
Show code cell source
# LQR Weights
Q = np.diag([10, 1, 10]) # Penalize angle error more than angular velocity
# R_values = np.linspace(0.001, .01, 4) # [0.001, 0.01, 0.1]
R_values = np.logspace(-4, 4, 9)
omega_freq = np.logspace(-2, 6, 500)
fig, ax = plt.subplots(2,2, figsize=(8, 8))
for R in R_values:
# Compute LQR Gain
# K, S, E = ct.lqr(A, B, Q, R)
Ka, Sa, Ea = ct.lqr(sys_aug, Q, R)
#> Loop transfer function L(s) = K * (sI - A)^-1 * B
#> Open-loop TF, L(s) = G(s) R(s), with R(s) = K
# from the error to the output
A_ol = np.block([
[ A - B @ Ka[:,:2], - B @ Ka[:,2:]],
[ np.zeros((1,2)), np.zeros((1, 1))]
])
B_ol = np.block([[.0], [.0], [1.]])
C_ol = np.block([[ C - D @ Ka[:,:2], - D @ Ka[:,2]]])
D_ol = np.zeros((1,1))
sys_ol = ct.ss(A_ol, B_ol, C_ol, D_ol)
#> Closed-loop TF
# from the disturbance signal to the output
# Simulate closed-loop response with reference input
A_cl = Aa - Ba @ Ka
B_ref = np.array([[0], [0], [-1]])
C_cl = np.array([[1, 0, 0]])
D_cl = np.zeros((1, 1))
sys_cl = ct.ss(A_cl, B_ref, C_cl, D_cl)
evals_cl = ct.poles(sys_cl)
#> Frequency response
mag_L, phase_L, omega_L = ct.frequency_response(sys_ol, omega_freq)
#> Plots
#> Bode plots (first line) of L(s)
ax[0,0].loglog(omega_L, mag_L, label=f'R={R}')
ax[0,1].semilogx(omega_L, np.degrees(phase_L), label=f'R={R}')
#> Nyquist diagram of L(s)
ax[1,0].plot(mag_L*np.cos(phase_L), mag_L*np.sin(phase_L), label=f'R={R}')
#> Eigenvalues of the closed-loop system
ax[1,1].plot(np.real(evals_cl), np.imag(evals_cl), 'x', label=f'R={R}')
#> Critical point and circle in Nyquist plot
theta_v = np.linspace(0, 2*np.pi, 100)
ax[1,0].plot([-1], [0], 'o', ms=5, color="black")
ax[1,0].plot(np.cos(theta_v), np.sin(theta_v), '--', color="black")
#> Formatting plots
ax[0,0].set_title('Bode Magnitude'); ax[0,0].grid(True); ax[0,0].legend()
ax[0,1].set_title('Bode Phase'); ax[0,1].grid(True)
ax[1,0].set_title('Nyquist Plot'); ax[1,0].grid(True); ax[1,0].set_aspect('equal'); ax[1,0].set_xlim([-5, 5]); ax[1,0].set_ylim([-5, 5])
ax[1,1].set_title('Eigenvalues of the closed-loop TF'); ax[1,1].grid(True); ax[1,1].set_aspect('equal')
ax[1,1].set_xlim([-1.5, .5]); ax[1,1].set_ylim([-1., 1.])
fig.set_tight_layout(True)
plt.show()
48.3.4.2. Optimal observer#
System equations, without disturbances/noise
Observer (state estimator) equations
so that the dynamical equation of the error \(\boldsymbol\varepsilon := \hat{\mathbf{x}} - \mathbf{x}\) reads
The dynamical equations of the augmented system, plant+observer, reads
and the observer design here is the design of a matrix \(\mathbf{L}\) that makes the dynamics of the error \(\boldsymbol\varepsilon\), and thus the matrix \(\mathbf{A} - \mathbf{L} \mathbf{C}\), asymptotically stable.
48.3.4.2.1. State estimator with process and measurement noise#
The state estimator problem with \(\mathbf{D}_d = \mathbf{0}\) and \(\mathbf{D}_\mathbf{r} = \mathbf{I}\) can be solved with the function \(\texttt{lqe}\) of the \(\texttt{control}\) library,
Show code cell source
#> Optimal state estimator
Edd = np.eye(1) * 0.01 # Process noise covariance
Err = np.array([[0.001]]) # Measurement noise covariance
#> Method 1.
Bd = np.array([[.0], [1.]]) # np.eye(2)
L, P, E = ct.lqe(A, Bd, C, Edd, Err)
print(L)
"""
#> Method 2.
# Use LQR duality: lqe(A, B, C, V, W) is dual to lqr(A.T, C.T, V, W)
# Note: we use C.T because it replaces B in the dual problem
L_transposed, P, E = ct.lqr(A.T, C.T, V, W)
# The actual observer gain is the transpose of the 'feedback' result
L = L_transposed.T
"""
[[13.87503766]
[96.258335 ]]
"\n#> Method 2.\n# Use LQR duality: lqe(A, B, C, V, W) is dual to lqr(A.T, C.T, V, W)\n# Note: we use C.T because it replaces B in the dual problem\nL_transposed, P, E = ct.lqr(A.T, C.T, V, W)\n\n# The actual observer gain is the transpose of the 'feedback' result\nL = L_transposed.T\n"
48.3.4.3. Combination of controller and observer - separation principle#
Show code cell source
#> Optimal controller
R = 1e-4
Ka, Sa, Ea = ct.lqr(sys_aug, Q, R)
A_cl_obs = np.block([
[ A - B @ Ka[:,:2], - B @ Ka[:,:2], - B @ Ka[:,2:]],
[ np.zeros((2,2)), A - L @ C, np.zeros((2, 1))],
[ C - D @ Ka[:,:2], - D @ Ka[:,:2], - D @ Ka[:,2:]]
])
B_cl_obs = np.block([[np.zeros((2,1))], [np.zeros((2,1))], [-1]])
C_cl_obs = np.block([ C - D @ Ka[:,:2], - D @ Ka[:,:2], - D @ Ka[:,2:]])
D_cl_obs = np.zeros((1, 1))
sys_cl_obs = ct.ss(A_cl_obs, B_cl_obs, C_cl_obs, D_cl_obs)
48.3.4.4. Properties of control#
…
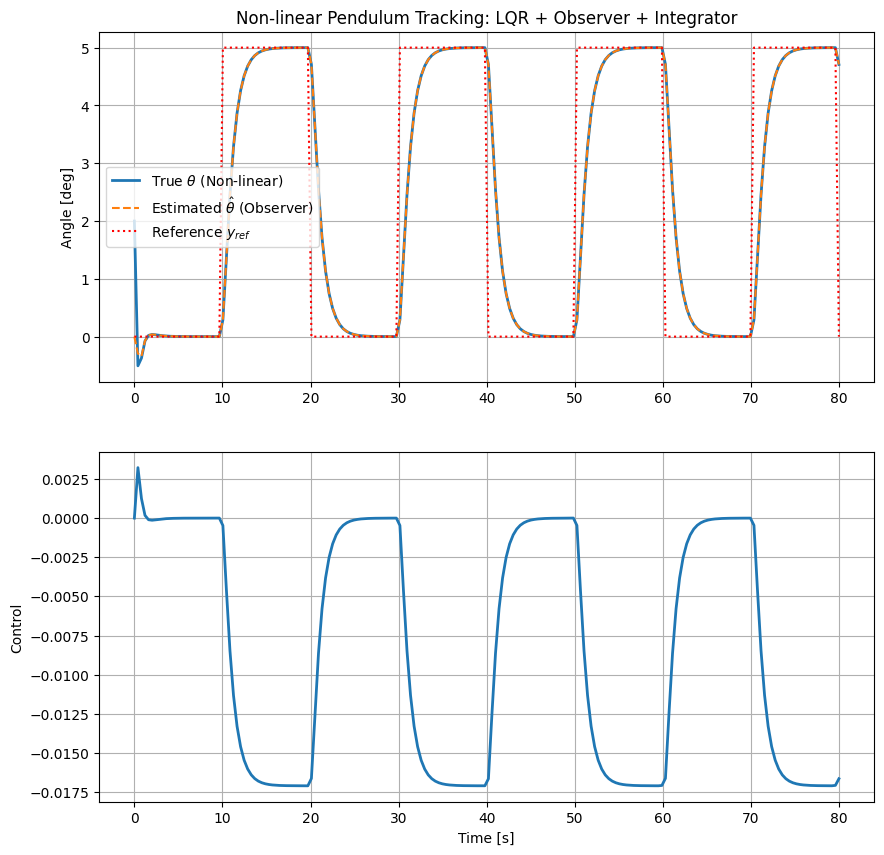
48.3.5. Verifying control on non-linear system#
48.3.5.1. Reference tracking on the non-linear system#
Here the control system is tested on the non-linear system for tracking a reference square wave signal.
Non-linear equations of the plant
Observer
Integral error
Proportional control
Show code cell source
from scipy.integrate import solve_ivp
from scipy.interpolate import interp1d
# solve_ivp(fun, t_span, y0, method="RK45", ..., args=tuple)
# fun(t, z, args=tuple)
def f(t, z, args):
"""
State, z = [ x, vareps, e_int ]
"""
#> args is supped to be a 1-element tuple with a dict
args_di = args
#> System parameters
g, l, m, c = args_di["g"], args_di["l"], args_di["m"], args_di["c"]
om_n = np.sqrt(g/l)
xi = c / (2 * m * l**2 * om_n)
#> Linearized system matrices
A, B, C, D = args_di["A"], args_di["B"], args_di["C"], args_di["D"]
#> Optimal control matrix
Kx, Ke = args_di["Kx"], args_di["Ke"]
#> State-estimator L matrix
L = args_di["L"]
#> Reference input: select the proper y_ref for the current time 't'
y_ref_func = args_di["y_ref_func"]
yref = y_ref_func(t) # Interpolates to get the value at time t
#> Motor physical limits
motor_clipping = args_di["motor_clipping"]
u_max = args_di["u_max"]
#> State variables
th, om, eps, e_int = z[0], z[1], z[2:4], z[4]
x = z[0:2]
#> Feed-back control
u = - Kx @ x - Kx @ eps - Ke @ z[4:]
if ( motor_clipping ):
u = np.clip(u, -u_max, u_max)
#> Need for anti-windup
# if (u_ideal > u_max and (C @ x + D @ u - yref) > 0) or (u_ideal < -u_max and (C @ x + D @ u - yref) < 0):
# de_int = 0 # Stop integrating...
# else:
# de_int = C @ x + D @ u - yref
dth = om
dom = om_n**2 * np.sin(th) - 2 * om_n * xi * om + u[0] / ( m * l**2 )
deps = ( A - L @ C ) @ eps
de_int = C @ x + D @ u - yref
return np.concatenate(([dth, dom], deps, de_int))
Show code cell source
#> Reference signal
t_span = [0, 80]
t_eval = np.linspace(t_span[0], t_span[1], 200)
y_ref_values = np.where(t_eval%20 < 10, np.radians(0), np.radians(5))
#> Create an interpolator to pass to the solve_ivb function
y_ref_func = interp1d(t_eval, y_ref_values, kind='linear', fill_value="extrapolate")
Show code cell source
# 1. Bundle all parameters into the dictionary
sim_config = {
"g": 9.81, "l": l, "m": m, "c": c, # Example physical params
"A": A, "B": B, "C": C, "D": D, # Linearized matrices
"Kx": Ka[:, :2], "Ke": Ka[:, 2:], # Optimal gains (Kx is 1x2, Ke is 1x1)
"L": L, # Observer gain
"y_ref_func": y_ref_func, # Ref input interpolator function
"motor_clipping": True, "u_max": .05 # Motor clippint
}
# 2. Set Initial Conditions [theta, omega, eps_theta, eps_omega, e_int]
# Example: System starts at 2 degrees, observer thinks it's at 0
# Error is defined to be eps = x_hat - x
z0 = [np.radians(2), 0, -np.radians(2), 0, 0]
# 3. Execute the simulation
from scipy.integrate import solve_ivp
sol = solve_ivp(
f,
t_span,
z0,
args=(sim_config,),
t_eval=t_eval,
method='BDF' # Standard Runge-Kutta integrator
)
Show code cell source
import matplotlib.pyplot as plt
#> Output and control effort
fig, ax = plt.subplots(2, 1, figsize=(10, 10))
#> Estimation error, eps = x_hat - x, x_hat = x + eps
hat_theta = sol.y[0] + sol.y[2]
# Plot True Pendulum Angle (convert back to degrees)
ax[0].plot(sol.t, np.degrees(sol.y[0]), label='True $\\theta$ (Non-linear)', linewidth=2) # output
ax[0].plot(sol.t, np.degrees(hat_theta), '--', label='Estimated $\\hat{\\theta}$ (Observer)') # estimated output
ax[0].plot(sol.t, np.degrees(y_ref_func(sol.t)), 'r:', label='Reference $y_{ref}$') # reference
ax[0].set_title("Non-linear Pendulum Tracking: LQR + Observer + Integrator")
# ax[0].set_xlabel("Time [s]")
ax[0].set_ylabel("Angle [deg]")
ax[0].legend()
ax[0].grid()
u = -Ka[:,:2] @ sol.y[0:2] - Ka[:,:2] @ sol.y[2:4] - Ka[:,2:] @ sol.y[4:]
ax[1].plot(sol.t, u[0], label='True $\\theta$ (Non-linear)', linewidth=2) # output
ax[1].set_ylabel("Control")
ax[1].set_xlabel("Time [s]")
ax[1].grid(True)
plt.show()
- 1
After the optimal control gain matrix \(\mathbf{K}\) has been computed, i.e. it’s not surprising that this open-loop system is stable.