44. Closed-loop control: requirements and performance#
Requirement/Performance |
… |
… |
|---|---|---|
Stability |
Nyquist criterion on the open-loop TF \(L(s)\) |
|
Robustness |
Stability margins |
|
Reference tracking |
Type of the system. Integrators in open-loop TF \(L(s)\) |
|
Measurement noise suppression |
||
Input load |
||
Input noise suppression |
||
Transient performance |
Let the transfer function of the system be
linking the control input \(\mathbf{u}\), and the exogenous inputs ( process disturbances \(\mathbf{d}\), and measurement noise \(\mathbf{n}\)) to the output \(\mathbf{y}\). Let control disturbance \(\Delta \mathbf{u}\) on the ideal control \(\mathbf{u}_c\) be additive, \(\mathbf{u} = \mathbf{u}_c + \Delta \mathbf{u}\). Let \(\mathbf{F}\) be a feed-forward system from reference \(\mathbf{r}\) to the reference output \(\mathbf{y}_{\text{ref}}\) that is compared with the output of the system \(\mathbf{y}\) to define the error \(\mathbf{e} = \mathbf{y}_{\text{ref}} - \mathbf{y}\) feeding the regulator \(\mathbf{R}\).
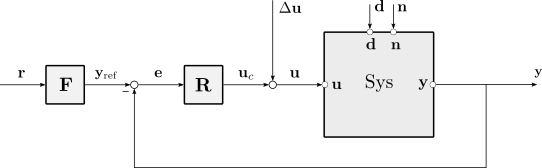
Fig. 44.1 Block diagram of the closed-loop system#
Closed-loop performance usually deals with the relation between the output \(\mathbf{y}\), the tracking error \(\mathbf{e}\), and the ideal control input \(\mathbf{u}_c\) (the output of he regulator; that’s what we need to care about for controller response, performance, saturation,…) w.r.t. the reference signal \(\mathbf{r}\) and the exogenous inputs \(\Delta \mathbf{u}\), \(\mathbf{d}\), \(\mathbf{r}\), in terms of:
tracking of the reference
control performance
disturbance suppression/noise rejection (on both the output and the input control)
For a MIMO
For a SISO
Two-degrees of freedom problem. Typical design procedure:
Design \(R\) to provide load/noise performance
Design \(F\) to provide tracking performance
Simplified model. If
there’s no feed-forward, i.e. \(\mathbf{F} = \mathbf{I}\) or \(F = 1\) for a SISO,
the measurement noise is additive on an ideal output, the TF is \(\mathbf{y} = \mathbf{G} \mathbf{u} + \mathbf{G}_d \mathbf{d} + \mathbf{n}\), i.e.\(\mathbf{G}_n = \mathbf{I}\) or \(G_n(s) = 1\) for a SISO,
for a MIMO
and for a SISO
For a SISO, beside process noise \(\mathbf{d}\) that may have its own dynamics, the performance of the closed loop system is defined by 4 transfer functions only, “the gang of the 4”,
sensitivity function (\(\mathbf{y}(\mathbf{n})\), \(\mathbf{e}(\mathbf{r})\), \(\mathbf{e}(\mathbf{n})\))
\[S = \frac{1}{1 + GR} \ ,\]complementary sensitivity (\(\mathbf{y}(\mathbf{r})\), \(\mathbf{u}_c(\Delta \mathbf{u})\))
\[T = \frac{GR}{1 + GR} \ ,\]load sensitivity (\(\mathbf{y}(\Delta \mathbf{u})\), \(\mathbf{e}(\Delta \mathbf{u})\))
\[PS = \frac{G}{1 + GR} \ ,\]noise sensitivity (\(\mathbf{u}_c(\mathbf{r})\), \(\mathbf{u}_c(\mathbf{n})\))
\[CS = \frac{R}{1 + GR} \ ,\]
Details
Output.
and thus
Error.
and thus
Input.
and thus
Algebraic constraint on sensitivity and complementary sensitivity. It’s not possible to make \(S(s)\) and \(T(s)\) small at the same time, as
Usually,
\(|S(j \omega)|\) small at low frequency \(\omega\) to get small error in the band of the reference and filtering low-frequency measurement noise on the inp
\(|T(j \omega)|\) small at high frequency \(\omega\) to filter high-frequency noise from \(\Delta u\) to \(u\) (usually reference signal \(r\) has no high-frequency content, so there should be little issues in filtering out the effect of reference signal to the output).