46.3. Phase and gain margin of optimal control#
Some results are available for phase and gain margin of optimal control, on the input side. todo discuss The relationship between the actual input to the plant \(u\) and an additive input error \(\Delta u\) reads
for a SISO or
for a MIMO system. The additive input error \(\Delta u\) can be thought as the difference between the ideal/design condition, due to un-modelled parts, failures, and any other form of discrepancy to the model altering the gain and the phase (adding delay) of the ideal control \(u_c\).
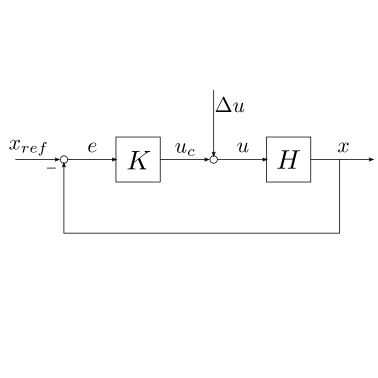
Fig. 46.1 Block diagram of optimal control closed-loop system with retroaction on the error \(e = x_{ref} - x\) on the full state.#
Details
For a SISO system, the relation between \(u\) and \(\Delta u\) reads
and thus
For a MIMO systems, TFs are matrix TFs and thus matrix inversion is required (as the division between matrix makes no sense at all),
46.3.1. SISO#
Details
Starting from the algebraic Lyapunov equation for the matrix \(\mathbf{P}\)
with the optimal matrix of gains, \(\mathbf{K} = \mathbf{R}^{-1} \mathbf{B}^T \mathbf{P}\). Adding and subtracting \(s \mathbf{I} \mathbf{P}\), and defining the matrix \(\mathbf{G}(s) = ( s \mathbf{I} - \mathbf{A} )^{-1}\),
Pre-multiplication by \(\mathbf{B}^T \mathbf{G}^T(-s)\) and post-multiplication by \(\mathbf{G}(s) \mathbf{B}\) gives
having used the expression of the optimal gain matrix to write \(\mathbf{B}^T \mathbf{P} = \mathbf{R} \mathbf{K}\), and defined the open-loop input TF matrix \(\mathbf{S}(s) := \mathbf{K} \mathbf{H}(s)\). Moving terms with or without \(\mathbf{S}(s)\) on two different sides of the equality, and adding \mathbf{R}, and collecting terms, it follows
Moving to Fourier domain, \(s = j \omega\), and recalling that \(\mathbf{S}^T(-j\omega) = \mathbf{S}^*( j \omega ) \),
todo Notation for semi-definite positive symmetric matrices
For a 1-dimensional state SISO system, \(\mathbf{R} = r\), \(\mathbf{S}(s) = S(s)\), and thus
46.3.2. MIMO#
with \(\mathbf{H}(s) = (s \mathbf{I} - \mathbf{A})^{-1} \mathbf{B}\), and \(\mathbf{S}(s) = \mathbf{K} \mathbf{H}(s)\) the open-loop TF between \(\Delta \mathbf{u}\) and the ideal control loop \(\mathbf{u}_c\), and \(\mathbf{I} + \mathbf{S}(s)\) the (inverse of the) transfer function between \(\Delta \mathbf{u}\) and \(\mathbf{u}\), as shown in (46.13).