45. Frequency domain control#
45.1. Stability of closed-loop SISO systems#
Let \(L(s) = G(s) R(s)\) the open-loop transfer function of the the system represented in Fig. 45.1: the system is explicitly represented as a combination of a plant with transfer function \(G(s)\) and a regulator with transfer function \(R(s)\). The output of the system \(y\), and the error \(e = y - y_{ref}\) are related with the reference signals as
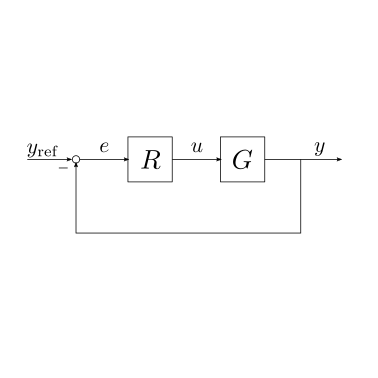
Fig. 45.1 Block diagram of the closed-loop system with retroaction on the output error \(e = y_{ref} - y\). Here, \(G(s)\) is the plant transfer function, \(R(s)\) is the regulator transfer function (that can be designed to control a given plant), and \(L(s) = G(s) R(s)\) is defined as the open-loop transfer function.#
Details
In Laplace domain, neglecting here the initial conditions,
and thus, with \(L = G R\) and SISO system (so that TF are not matrix but scalar functions)
For the output error,
and thus
45.1.1. Cauchy argument principle#
For the Cauchy argument principle, the difference of argument of function \(F(s)\) when \(s\) performs a counter-clockwise loop over th contour \(\Gamma\) enclosing poles \(p_n\), and zeros \(z_d\) of the function \(F(s)\) reads
and thus the the diagram of function \(F(s)\) performs
loops around the origin \(0+i 0\) of the complex plane.
45.1.2. Nyquist stability criterion#
Nyquist stability criterion provides the conditions for the stability of the closed loop transfer functions (45.1). As shown in section about stability of LTI systems, a linear system is asymptotically stable if all of its poles have negative real parts.
All the closed-loop transfer functions have the same poles (as they have the same denominator, except for dangerous cancellations not changing the stability but the observability or the controllability todo Discuss).
The poles of the closed loop systems are the zeros of the function \(1 + L(s)\). If the closed-loop system is asymptotically stable, it must have no pole with positive real part. As the complex variable \(s\) performs a clockwise (and thus, the signs of the relation change w.r.t. Cauchy argument criterion) loop over Nyquist path (semicircle in the RHS half-plane; then todo discuss the case where poles and zeros are on the imaginary axis…deform the path…). No zero of \(1 + G(s)\) with positive real part means \(Z = 0\). Using the relation between poles, zeros and loops around the origin given by Cauchy argument principle (45.2), and recalling the opposite direction, it follows that
in order to have \(Z = 0\), i.e. the diagram of \(1+G(s)\) must perform \(N\) counter-clockwise loops around \(0+i0\) equal to the number of its poles with positive real parts. As the poles of \(1+ G(s)\) are the same as the poles of \(G(s)\), it’s possible to formulate Nyquist criterion looking at \(G(s)\), as
Theorem 45.1 (Nyquist theorem)
In order for the closed-loop system to be asymptotically stable, the diagram of the open-loop transfer function \(G(s)\) must perform a number \(N\) of counter-clocwise loops around the critical point \(-1 + i \, 0\) equal to the number of its zeros with positve real part.
45.1.3. Bode stability criterion for minimal phase systems#
Definition 45.1 (Minimal phase systems)
…
…
Theorem 45.2 (Bode stability criterion)
…